|
Основы построения систем питания ПЛИС
Программируемые логические схемы предъявляют особые требования к конструированию источников питания. В статье рассматриваются особенности проектирования источников питания ПЛИС Xilinx с применением ИС питания фирмы Semtech.
Введение
Программируемые логические интегральные схемы (ПЛИС), как FPGA, так и CPLD, находят все большее применение в разнообразных областях и решают различные задачи — от простой логики до цифровой обработки сигналов, и поэтому, для их питания требуются различные уровни мощности. В целом, мощность, необходимая для питания ПЛИС, определяется следующими факторами: тип ПЛИС, ее рабочая частота, температура окружающей среды, число задействованных линий ввода-вывода и, конечно, процент используемых ресурсов ПЛИС.
По большому счету, проектирование источника питания ПЛИС — сложная инженерная задача. Каждая фирма-разработчик ПЛИС публикует соответствующую документацию по построению схем питания своих устройств. Чтобы упростить этот процесс, фирма Xilinx разработала специальное программное средство для оценки мощности потребления ПЛИС — Xilinx Power Estimator [1].
В статье подробно обсуждаются вопросы проектирования систем питания ПЛИС.
В качестве элементной базы для построения систем питания рассмотрены компоненты фирмы Semtech. Для этих целей компания выпускает широкий спектр интегральных схем (ИС) с уникальными характеристиками, как линейных, так и импульсных. Таким образом, с помощью только стабилизаторов фирмы Semtech можно полностью решить проблему питания любой системы на основе ПЛИС.
Уникальные требования к системе питания ПЛИС
Основная функция системы управления питанием ПЛИС ясна: обеспечить ПЛИС и сопряженные с ней схемы стабилизированным напряжением во всех режимах работы в точно установленных пределах изменения нагрузки. Но, как правило, достичь этого не так просто, поскольку необходимо учитывать следующие факторы: изменение температуры окружающей среды и тока нагрузки, флуктуацию входного напряжения. К тому же по потребляемой мощности ПЛИС значительно отличаются от других интегральных схем.
На ПЛИС реализуется неограниченное число всевозможных конфигураций схемы, работающих на разных тактовых частотах и, следовательно, потребляющих разную мощность. А так как исходными данными для проектирования системы питания ПЛИС является потребляемая мощность, разработчик должен иметь максимально четкое представление о проектируемой системе и условиях ее функционирования. Для этого необходимо определить:
- тактовую частоту ПЛИС (потребляемая мощность пропорциональна частоте);
- количество задействованных ресурсов ПЛИС;
- скорость передачи данных, осуществляемых ПЛИС;
- наличие конфигурационного перепрограммируемого постоянного запоминающего устройства (ППЗУ);
- число необходимых питающих напряжений и отдельных источников питания;
- диапазон рабочих температур.
Кроме того, для построения оптимальной системы питания ПЛИС разработчику предстоит правильно спроектировать топологию печатной платы и заземление всей системы. В общем, данная система питания должна удовлетворять следующим требованиям, которые обсуждаются в примерах применения для ПЛИС [4–9]:
- ограничить параметры переходного процесса при включении питания.
Для этого:
- обеспечить значительный ток (1–2 А) при включении питания,
- обеспечить монотонность протекания переходного процесса по напряжению питания,
- время протекания переходного процесса до номинального значения напряжения не должно быть больше определенной величины, указанной в спецификации для конкретного семейства ПЛИС, в зависимости от типа семейства ПЛИС требуется обеспечить определенную последовательность подачи питающих напряжений;
- максимально снизить уровень высокочастотного шума, неизбежного в цифровых высокоскоростных схемах.
Для этого необходимы:
- раздельные шины питания для различных основных потребителей тока,
- установка достаточного количества шунтирующих конденсаторов,
- корректная разводка печатной платы.
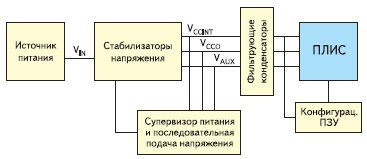
Рис. 1. Блок-схема системы питания ПЛИС
В целом структурная схема системы питания ПЛИС (рис. 1) состоит из первичного источника питания, формирующего входное напряжение (Vin) для стабилизатора напряжения, схемы, устанавливающей последовательность подачи различных напряжений и по необходимости схемы слежения за уровнями напряжений (супервизор). Следует особо отметить, что одним из ключевых компонентов системы питания ПЛИС является цепочка шунтирующих конденсаторов вокруг ПЛИС. Они позволяют распределить рабочий ток между потребителями, используя низкоимпедансные пути прохождения тока, тем самым снижая уровень высокочастотного шума. Кроме того, к важным моментам относится и правильность разводки печатной платы, особенно земляных полигонов.
Уровни питающих напряжений ПЛИС
Для питания разных функциональных блоков ПЛИС используются различные уровни напряжения. Для обеспечения одного уровня напряжения необходим один вторичный источник питания.
Все ПЛИС нуждаются в источнике напряжения питания ядра, но большинство сложных ПЛИС испытывают потребность и в отдельном источнике напряжения питания для блоков ввода-вывода, источнике опорных напряжений, источнике напряжения для терминальных резисторов и источнике напряжения для дополнительных функций. Рассмотрим более подробно типы напряжения питания, необходимые для ПЛИС Xilinx:
- VCCINT. Внешнее напряжение питания ядра. Является основным питающим напряжением ПЛИС и, как правило, обеспечивает большую часть мощности, затрачиваемой в ПЛИС. Основное напряжение источника зависит от семейства ПЛИС. Ряд основных напряжений питания включает: 1,2; 1,5; 1,8; 2,5; 3,3 и 5,0 В. Напряжение питания ядра может использоваться и для питания конфигурационного ППЗУ.
- VCCO. Напряжение питания блоков ввода-вывода. ПЛИС от Xilinx содержат блоки ввода-вывода, которые могут быть сконфигурированы для работы по различным стандартам. В зависимости от того, какой стандарт выбран разработчиком, применяются различные уровни напряжений (1,5; 1,8; 2,5; 3,0 и 3,3 В). Конфигурирование блоков ввода-вывода возможно в одной и той же ПЛИС, но подразумевает наличие нескольких источников напряжения питания устройства ввода-вывода (VCCO).
- VCCAUX. Вспомогательное напряжение питания, необходимое для различных вспомогательных функций ПЛИС, например для устройства управления тактовой частотой или интерфейсом JTAG. Вспомогательные устройства более чувствительны к шуму, нежели другие, и поэтому VCCAUX имеет более высокие требования по развязке для минимизации наведенного шума. Напряжения VCCAUX могут быть 2,5 и 3,3 В. В случае если источник питания ядра напряжением VCCO обладает низким шумом, от него можно запитать блоки вспомогательных функций.
- VCCAUXTX. Вспомогательное напряжение питания для RocketIO-трансиверов, которыми располагает семейство ПЛИС Virtex-II Pro. Это питающее напряжение обладает особыми требованиями к шуму. Устройство должно быть запитано отдельным стабилизатором напряжения, подключенным к отдельной заземляющей поверхности на печатной плате (GNDA).
- VREF. Опорное напряжение питания необходимо для дифференциального порта, использующего различные стандарты ввода-вывода, таких как LVDS.
- VTT. Напряжение питания терминальных резисторов.
Последовательность подачи питающих напряжений
В зависимости от семейства ПЛИС может потребоваться определенная последовательность подачи питающих напряжений. Для семейства Spartan-IIE требуется одновременная подача напряжений VCCINT и VCCO. Если напряжение ядра VCCINT подать раньше напряжения питания блоков ввода-вывода, ток может резко вырасти из-за того, что линии ввода-вывода не находились в высокоимпедансном состоянии. Тем не менее, если ток ICCPO обеспечивается источником питания VCCINT, процесс включения будет успешным независимо от последовательности подачи питающих напряжений. Для семейства Virtex-II Pro очередность включения источников не важна, за исключением источника VCCAUX, который должен включаться раньше VCCO, чтобы обеспечить минимальный ток от источника питания. Для уточнения конкретных требований следует обратиться к оригинальной документации.
Одно из решений проблемы очередности подачи питающих напряжений — применение стабилизаторов напряжения с дополнительным выводом разрешения работы.
Основные рекомендации по выбору источника питания
Для питания ПЛИС предназначены как схемы понижения первичного напряжения питания, так и схемы повышения. В первом случае можно использовать стабилизаторы не только непрерывного действия, но и ключевые. Во втором — лишь импульсный тип преобразования напряжения. Рассмотрим критерии выбора типа стабилизаторов напряжения.
Линейные и импульсные стабилизаторы напряжения
Как только определена максимальная мощность и напряжение питания ПЛИС, можно выбрать тип преобразователя. В таблице 1 представлены основные функциональные отличия линейных стабилизаторов напряжения от импульсных.
Таблица 1. Сравнение линейных и импульсных стабилизаторов напряжения
| Параметр |
Линейный |
Импульсный |
| Сложность проектирования |
низкая |
от средней до высокой |
| Напряжение пульсаций на выходе |
низкое |
от среднего до высокого |
| Необходимость в радиаторе |
да |
нет |
| Эффективность |
низкая |
высокая |
| Стабилизационные характеристики |
отличные |
от средних до хороших оптимальных |
| Генерация помех |
низкая |
от средней до высокой |
| Длительность переходных процессов |
от средней до быстрой |
от медленной до средней |
| Предельно допустимый выходной ток |
от низкого до умеренного |
от низкого до высокого |
| Нестабильность напряжения |
от низкой до высокой |
от очень низкой до средней |
| Возможность регулирования напряжения |
есть |
есть |
| Повышение выходного напряжение |
отсутствует |
имеется |
| Стоимость |
низкая |
от умеренной до высокой |
| Уровень шума |
низкий |
от среднего до высокого |
Кроме очевидных параметров установившегося состояния напряжения источника питания и потребляемого тока существует несколько других требований для источника напряжения, которые проявляются во время переходного процесса при включении питания и во время работы ПЛИС. Наиболее важными из них являются: тип переходного процесса по напряжению при включении питания, монотонность его протекания, наличие шумов в цепи питания и в цепи заземления (совместный коммутационный шум). Совместный коммутационный шум может быть снижен цепью шунтирующих конденсаторов.
Характеристика ИС стабилизаторов компании Semtech
Рассмотрим характеристики стабилизаторов, рекомендуемых компанией Semtech для проектирования источников питания ПЛИС Xilinx. Они представлены в таблицах выбора (таблицы А, Б, В приводятся в конце статьи), разработанных инженерами компании Semtech.
Линейные стабилизаторы
Компанией Semtech производятся два типа устройств: линейные стабилизаторы и контроллеры линейных стабилизаторов (без встроенного проходного транзистора). Линейные стабилизаторы Semtech обладают высокой точностью (от 1 до 3,5%), поставляются в различных корпусах и располагают дополнительными функциями, такими, как температурная защита, защита от превышения тока и режим отключения, в котором ИС потребляют около 10 мкА.
Стабилизаторы Semtech выпускаются сфиксированным или регулируемым выходным напряжением на выходной ток до 10 A, для стабилизаторов с ультранизким падением напряжения это напряжение составляет 75 мВ.
Ряд стабилизаторов специфицирован на уменьшение выходного шума, его среднеквадратичное значение составляет 26 мкВ.
Компания Semtech, будучи одной из ведущих компаний в области разработки устройств защиты от электростатических (ESD) и электромагнитных (EMI) помех, производит некоторые стабилизаторы с защитой от ESD, согласно стандарту JEDEC JESD22-A114-B. В таблице 2 приведены основные характеристики линейных стабилизаторов и контроллеров, рекомендованных фирмой Semtech для применения в источниках питания ПЛИС Xilinx.
Таблица 2. Линейные стабилизаторы и контроллеры
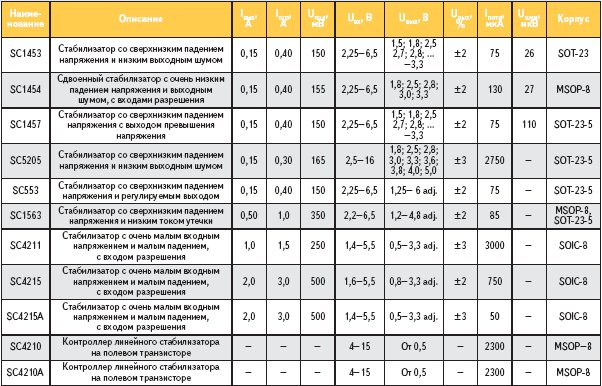
Примечание: adj. — регулируемый выход. Таблица отсортирована по возрастанию выходного тока.
Импульсные стабилизаторы
Импульсные стабилизаторы выпускаются для преобразователей с гальванической развязкой или без гальванической развязки.
Серия ИС для импульсных источников питания охватывает все топологии импульсных преобразователей напряжения: понижающая, повышающая, инвертирующая, двухполярный инвертирующий преобразователь Кука (SEPIC). Наиболее распространенной схемой для построения источников питания для микропроцессорной техники является схема понижающего преобразователя с синхронным выпрямлением.
Импульсные стабилизаторы компании Semtech — это высоко интегрированные высокоэффективные микросхемы, работающие на высокой частоте преобразования вплоть до 2,5 МГц, что позволяет значительно снизить размеры индуктивностей и конденсаторов, сэкономив пространство на печатной плате. Кроме стабилизаторов изготавляваются также контроллеры без внутреннего ключевого транзистора. Все контроллеры и стабилизаторы обладают встроенными схемами вольтодобавки для управления затворами ключевых транзисторов.
Большинство ИС стабилизаторов представляют собой сдвоенные схемы, обеспечивающие два выходных напряжения. В этом случае (для снижения выходных пульсаций) на выходах формируются сигналы с разностью фаз 180°. Некоторые ИС (SC2441/A), кроме двух понижающих контроллеров, имеют и повышающий преобразователь. Он может использоваться для питания драйверов MOSFET понижающих преобразователей или
как третий отдельный выход.
Стабилизаторы обладают отличными динамическими и переходными характеристиками, обеспечивая ограничения тока в каждом цикле преобразования для защиты от перегрузки по току при коротком замыкании в выходной цепи.
Большинство ИС обладают дополнительными функциями: защита от понижения напряжения с гистерезисом, защита от перегрева и плавный старт. Для сдвоенных стабилизаторов дополнительные функции раздельные. Все ИС выполнены в миниатюрных корпусах поверхностного монтажа, что значительно экономит площадь печатной платы и снижает стоимость производства (рис. 2).
Рис. 2. Корпуса ИС SC4501
Необходимо отметить также уровень технической поддержки, осуществляемой фирмой Semtech. Для большинства ключевых стабилизаторов и контроллеров выпускаются отладочные платы, в спецификациях подробно описан принцип работы и примеры применения, а также приводится топология печатной платы и схемы классического применения ИС. В таблице 3 приведены ИС стабилизаторов и контроллеров, рекомендованных компанией Semtech для построения систем питания ПЛИС Xilinx. Таблица отсортирована по возрастанию выходного тока.
Таблица 3. Импульсные стабилизаторы напряжения и контроллеры
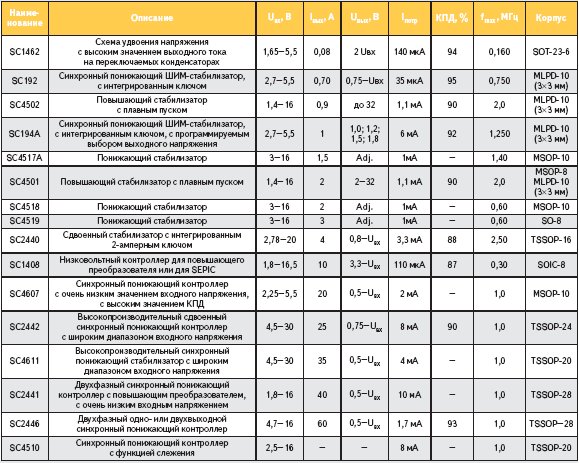
Примечание: adj. — регулируемый выход.
Все ИС выполнены в индустриальном диапазоне температур (–40...+85 °С).
Рост тока при включении питания
Рост тока в момент переходного процесса при включении питания обусловлен особенностями архитектуры ПЛИС, основанной на SRAM-технологии.
Каждый раз при включении питания конфигурационная программа загружается в оперативную память (RAM) из внешней постоянной памяти.
Однако в течение небольшого периода (порядка нескольких мс) — в момент включения питания — оперативная память находится в случайном состоянии и может вызвать скачок тока благодаря случайному конфликтному соединению внутренних блоков ПЛИС. Для большинства других ИС значительного превышения рабочего тока в момент включения не наблюдается.
Рост тока (ICCPO) при включении питания продолжается несколько миллисекунд и происходит между определенными промежуточными уровнями напряжения.
Например, для семейства Spartan переходная характеристика приводится в виде линейно-нарастающего напряжения между 0,6 и 0,8 В. Во время переходного процесса ПЛИС может рассматриваться как низкоимпедансный элемент с сопротивлением от 0,3 до 6 Ом.
Для успешной реализации включения ПЛИС и линейного нарастания напряжения в спецификации к ПЛИС приводится минимальное значение тока (ICCPO min), которое должен обеспечить источник питания. Необходимо учесть, что значение этого тока зависит от температуры кристалла (Tj) ПЛИС. Так, для семейства Spartan-II минимальное значение тока при включении питания (ICCPO min) равно 1,5 A (при температуре Tj = –40 °C для промышленного исполнения), а для коммерческого исполнения — 0,25 А (при температуре 0 °С).
Таким образом, источник питания во время переходного процесса должен поддерживать ток ICCPO для обеспечения правильной работы ПЛИС.
В процессе конфигурации ПЛИС также наблюдается рост тока на величину порядка 50–100 мА [3].
Верхняя граница тока переходного процесса (ICCPO) определяется предельной мощностью источника питания, поэтому максимальное значение ICCPO в спецификации не приводится. Длительность переходного процесса определяется временем реакции источника питания.
При проектировании источника питания нужно уделить особое внимание, с одной стороны, требованию обеспечения тока ICCPO, а с другой — ограничению тока переходного процесса для того, чтобы он не вызвал срабатывание схемы защиты стабилизатора от перегрузки по току и это не привело к его выключению.
Для линейных стабилизаторов существует номинальный параметр — ток ограничения при коротком замыкании (ILIM или IОГР).
Во время подачи питания ПЛИС может рассматриваться как нагрузка, стремящаяся обеспечить режим короткого замыкания. Поэтому, выбирая стабилизатор, нужно убедиться, что выполняется условие ILIM > ICCPO.
Для импульсных стабилизаторов компании Semtech существует возможность изменения тока ограничения ILIM при проектировании схемы источника питания. На рис. 3, 4 изображены переходные процессы напряжения и тока для случая роста тока без ограничения (сплошные линии), а также для случая с ограничением (пунктирная линия). В случае без ограничения рост тока превышает уровень срабатывания схемы защиты от короткого замыкания, в случае использования схем с ограничением по току переходный процесс задерживается на определенное время.
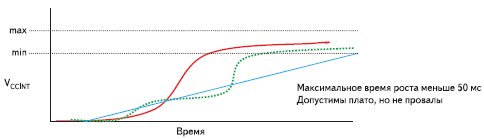
Рис. 3. Рост напряжения
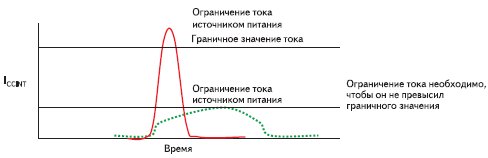
Рис. 4. Ограничение тока
Характер роста напряжения при включении питания и требования ко времени переходного процесса
В момент включения питания очень важны продолжительность и монотонность протекания переходного процесса по напряжению питания ядра (без колебаний), особенно когда конфигурация ПЛИС происходит сразу после включения питания.
Монотонность переходного процесса важна, так как любое падение напряжения VCCINT при критическом напряжении сброса (VCCPOR) может прервать поток данных, загружаемых из конфигурационной памяти в ПЛИС. На рис. 3 изображен именно монотонный переходный процесс.
Для всех ПЛИС продолжительность протекания переходного процесса по напряжению VCCINT не должна превышать 50 мс. Этот параметр для каждого семейства ПЛИС разный. Требования к монотонности переходного процесса и его продолжительности также относятся и к конфигурационному ППЗУ. Нарушение подобных требований при включении питания может привести к неверной конфигурации ПЛИС.
Наличие конфигурационной памяти ПЛИС тоже накладывает требования на рабочие характеристики источника питания. Например, рис. 5 поясняет требования, предъявляемые к продолжительности переходного процесса по напряжению для семейства конфигурационной памяти XC18V00. Данный пример показывает, что минимальная продолжительность переходного процесса больше чем 200 мкс. Заметьте, что ППЗУ и ПЛИС удерживаются в состоянии сброса до тех пор, пока напряжение VCCINT не достигнет значения напряжения сброса VCCPOR. Когда нужное значение достигнуто, осуществляется задержка для достижения напряжением минимального рабочего значения VCCINT min. После сигнала системного сброса начинается процесс загрузки ПЛИС. Обратите внимание, что при медленном нарастании VCCINT требуется дополнительная задержка для удержания ПЛИС и ПЗУ в состоянии сброса до тех пор, пока напряжение питания не достигнет минимального рабочего значения VCCINT min. Для этого необходимо использовать дополнительную схему слежения за напряжением питания (супервизор).
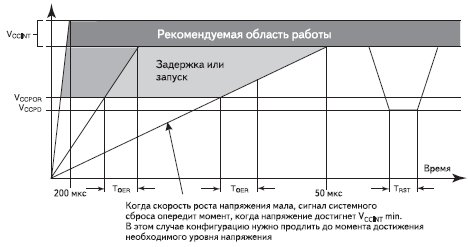
Рис. 5. Пояснение к требованию скорости роста напряжения питания для семейства XC18V00 с конфигурационной постоянной памятью
Если уровень напряжения на входе ПЗУ падает ниже своего минимального порога (VCCPD) на время большее, чем TRST, то ПЗУ перейдет в состояние сброса, пока VCC опять не достигнет уровня VCCPOR. Дополнительная информация представлена в спецификации XC18V00 Series of In-System Programmable Configuration PROMs, DS026 (v5.0). Необходимо также отметить, что при падении напряжения VCCINT до уровня ниже своего минимального рабочего значения, оно должно достигнуть меньшего значения, чем 0,1 В перед тем, как снова вернется в нормальное рабочее значение. Следовательно, разрядные резисторы должны обеспечивать быстрое снижение напряжения на шунтирующих конденсаторах.
Шум источника питания
Уровень шума дополнительного напряжения питания VCCAUX весьма важен для некоторых ПЛИС. Уровень пульсаций и шума для VCCAUX должен быть ниже 200 мВ пикового значения, а скорость изменения постоянной составляющей этого напряжения не должна быть выше 10 мВ/мс (рис. 6).
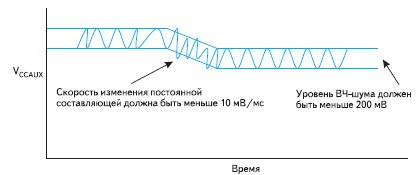
Рис. 6. Высокочастотный шум и скорость изменения VCCAUX
Шунтирующие конденсаторы
Для снижения уровня высокочастотного шума на каждый вывод питания ПЛИС необходимо ставить шунтирующий конденсатор. Шунтирующий конденсатор для ядра ПЛИС обеспечивает возможность протекания кратковременных переходных токов. В зависимости от семейства ПЛИС и конкретного его применения, ядро может потребовать амперных выбросов тока длительностью 50 пс. Таким образом, частотный диапазон, покрываемый шунтирующими конденсаторами, должен быть от 1 кГц до 500 МГц (см. источник [1. стр. 23]). Кроме того, частотный диапазон может быть разбит на три поддиапазона: низкий, средний и высокий. Для высокочастотного диапазона необходимо использовать конденсатор с низкой индуктивностью и емкостью от 0,0001 до 0,1 мкФ и помещать его на расстоянии не больше чем 1 см от вывода питания ПЛИС.
Для определения параметров ВЧ конденсатора Xilinx использует метод «запаса (хранения) средней энергии». Подробно этот метод рассмотрен в [1].
Шунтирующие конденсаторы требуются и для протекания «ключевых» токов блоков ввода-вывода. Общая величина тока системы ввода-вывода определяется числом одновременно коммутируемых выводов (ОКВ или SSO). Максимальное число ОКВ для каждого банка ввода-вывода определено в спецификации конкретной ПЛИС. Процент использования выводов от максимального числа ОКВ определяет количество необходимых шунтирующих конденсаторов [5].
Алгоритм проектирования схемы питания ПЛИС с использованием таблиц выбора
Итак, система питания ПЛИС представляет собой набор стабилизаторов, обеспечивающих необходимые уровни питающих напряжений и токов. Поэтому для начала следует определить степень применения ресурсов ПЛИС, а затем оценить потребляемые токи и используемые уровни напряжений. Далее, исходя из семейства и условий работы ПЛИС, выбирают оптимальное решение для системы питания — тип стабилизатора и конкретную ИС.
Оптимальный выбор стабилизатора легко осуществить с помощью трех таблиц выбора (приводятся в конце статьи), составленных фирмой Semtech для всех производимых семейств ПЛИС фирмы Xilinx. В таблице А представлены напряжения питания ядра, блоков ввода-вывода и вспомогательные напряжения всех семейств ПЛИС и конфигурационной памяти. Для большинства ПЛИС указан ток потребления в момент подачи питания, максимальный ток потребления блоков ввода-вывода и ток потребления вспомогательными устройствами ПЛИС. Таблица Б предлагает провести выбор стабилизаторов для семейств ПЛИС и памяти. Выбор осуществляется исходя из следующих параметров: напряжение первичного источника питания (VIN), напряжение ядра ПЛИС (VINT) и потребляемый ток. Таблица В предоставляет возможность выбора стабилизатора напряжения блоков ввода-вывода и дополнительных функций. Параметрами выбора являются: напряжение подсистемы питания ввода-вывода (VCCO), первичное напряжения питания VIN и ток потребления.
Удобен следующий алгоритм проектирования системы питания ПЛИС с использованием таблиц выбора ИС стабилизаторов:
- Выбрать конкретную ПЛИС и необходимую рабочую частоту.
- Оценить потребляемую мощность ПЛИС в соответствии со значением напряжения питания ядра (VCCINT), ввода-вывода (VCCO) и вспомогательных функций (VCCAUX), используя Xilinx Power Estimator [1].
- Для определения подходящих ИС стабилизаторов питания используем таблицы выбора (в конце статьи).
По таблице А выбираем необходимые для семейства напряжения питания ядра, блоков ввода-вывода и вспомогательного напряжения.
По таблице Б находим ИС стабилизатора для питания ядра ПЛИС.
По таблице В определяем ИС стабилизаторов для питания блоков ввода-вывода и питания дополнительных функций.
- Таблицы обеспечивают только начальный выбор подходящих стабилизаторов.
Для каждого решения необходимо дальнейшее уточнение условий работы — параметров по постоянному току (входное напряжение, потребляемый ток, рассеиваемая мощность и максимальная температура перехода), а также условий протекания переходных процессов (ток при включении питания, стабильность при изменении импеданса нагрузки).
Таблица А. Напряжения питания ядра, линий ввода-вывода и вспомогательные напряжения питания для семейств Xilinx FPGA, CPLD и конфигурационного ПЗУ
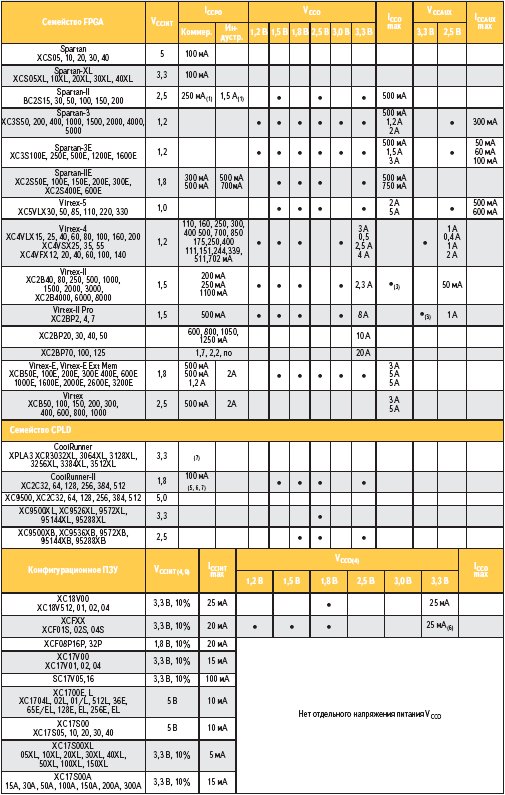
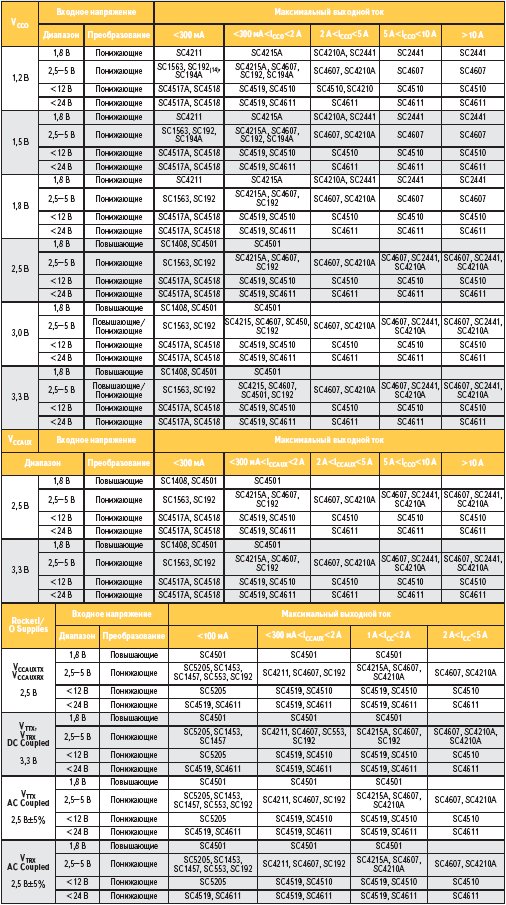
Таблица Б. Выбор стабилизаторов напряжения для питания ядра ПЛИС (FPGA и CPLD) или конфигурационной памяти


Таблица В. Стабилизаторы для питания линий ввода-вывода и дополнительных функций
Пример выбора схемы питания ПЛИС
При построении схемы питания необходимо руководствоваться документом [4].
- Выберем для примера ПЛИС Virtex-II Pro XC2VP70.
- С помощью программного средства [1] оценим потребляемую мощность для всех источников питания используемых в Virtex-II Pro XC2VP70.
- Входное напряжение VIN = 5 В;
- VCCINT = 1,5 В, при ICCINT = 8 А;
- VCCO = 3,3 В, при ICCO = 2 A;
- VCCAUX = 2,5В, при ICCO = 300 мА.
- Из предыдущего шага определили необходимые величины мощности:
На основании таблицы Б найдем ИС, удовлетворяющие параметрам мощности. Возможны три следующих решения для источника напряжения VCCINT:
- импульсный стабилизатор напряжения SC4607;
- импульсный стабилизатор напряжения SC2441 или
- контроллер линейного стабилизатора напряжения SC4210A.
- Произведем расчеты рассеяния мощности, температуры перехода кристалла и КПД. Выходная мощность для источника питания напряжением 1,5 В:
POCCCINT = VCCINT x ICCINT = 1,5 В x 8 А = 12 Вт.
Для линейного стабилизатора напряжения входная мощность была бы следующей:
PICCCINT = VIN x ICCINT = 5 VDC x 8 A = 40 Вт.
А рассеяние мощности:
PDCCCINT = PICCCINT – POCCCINT = 40 – 12 = 28 Вт.
Тогда КПД был бы следующий:
КПД = POCCCINT/PICCCINT = 12/40 = 30%.
Применим транзистор — FDB7030BL (Fairchild).
Тогда температура кристалла транзистора составит:
TJ = RJA x PDCCCINT + TA = 62,5 x 28 + 40 = 1790 °С
намного больше предельно допустимой (150 °С). Таким образом, мы вынуждены будем применить радиатор.
Чтобы не рассеивать не нужную мощность и тем самым повысить КПД и снизить габариты источника питания, будем использовать импульсный стабилизатор напряжения.
Для питания ядра и блоков ввода-вывода возьмем ИС SC4607.
Для питания вспомогательных функций и терминальных резисторов выберем линейные стабилизаторы напряжения со сверхнизким падением напряжения SC4215 и SC1563 соответственно.
Заключение
Мы рассмотрели только некоторые аспекты разработки источников питания ПЛИС. При конкретном проектировании, конечно, появится множество других вопросов и «подводных камней», например, разводка печатной платы, выбор пассивных компонентов и т. д. Разумеется, больше всего вопросов возникнет при разработке импульсных стабилизаторов, выборе рабочей частоты, ограничении тока, построении выходного фильтра.
Данная статья ни в коем случае не претендует на замену оригинальных спецификаций, скорее наоборот — это обзор и руководство по дальнейшему использованию. При проектировании источника питания, естественно, придется обратиться к документации как для ПЛИС, так и для ИС стабилизаторов напряжения.
С целью повышения КПД системы питания лучше использовать импульсные стабилизаторы, особенно если первичный источник питания — батарея или аккумулятор.
Необходимо также отметить основные достоинства ИС стабилизаторов компании Semtech: высокий КПД, высокая частота работы ключевых стабилизаторов и контроллеров, что обеспечивает малые размеры пассивных элементов, небольшое количество дополнительных элементов, требуемых для построения ключевых стабилизаторов. Все ИС питания Semtech производятся в миниатюрных корпусах для поверхностного монтажа.
По материалам «Руководства по проектированию источников питания ПЛИС Xilinx компании Semtech» (Semtech Power Management Application and Design Guide for Xilinx FPGAs).
Литература
- Интернет-ресурс для расчета потребляемой мощности ПЛИС Xilinx Web Power Tools: www.xilinx.com/products/design_resources/power_central/index.htm
- Таблицы выбора ИС питания: www.semtech.com/pc/downloadDocument.do?id=654 (файл FPGAX-SG. pdf)
- XAPP158 «Powering Xilinx FPGAs» — «Питание ПЛИС Xilinx».
- XAPP189 «Powering Xilinx Spartan-II FPGAs» — «Питание ПЛИС семейства Spartan-II».
- Каршенбойм И. Микросхемы FPGA фирмы Actel // Компоненты и технологии. № 2. 2003.
- XAPP451 «Power-Assist Circuits for the Spartan-II and Spartan-IIE Families» — «Вспомогательные цепи для питания ПЛИС семейств Spartan-II и Spartan-IIE».
- XAPP623 «Power Distribution System (PDS) Design: Using Bypass/Decoupling Capacitors» — «Система распределенного питания, использование шунтирующих конденсаторов».
- XAPP689 «Managing Ground Bounce in Large FPGAs» — «Снижение скачков общего потенциала в больших проектах, использующих ПЛИС».
- XAPP450 «Power-On Requirements for the Spartan-II and Spartan-IIE Families» — «Требования при включении питания для семейств Spartan-II и Spartan-IIE».
- XAPP389 «Powering CoolRunner-II CPLDs» — «Питание ПЛИС семейства CoolRunner-I»I.
- XAPP110 «XC9500 CPLD Power Sequencing» — «Последовательность подачи напряжений питания ПЛИС семейства XC9500».
Юрий ШАРОПИН, Владимир БУДАЕВ
|